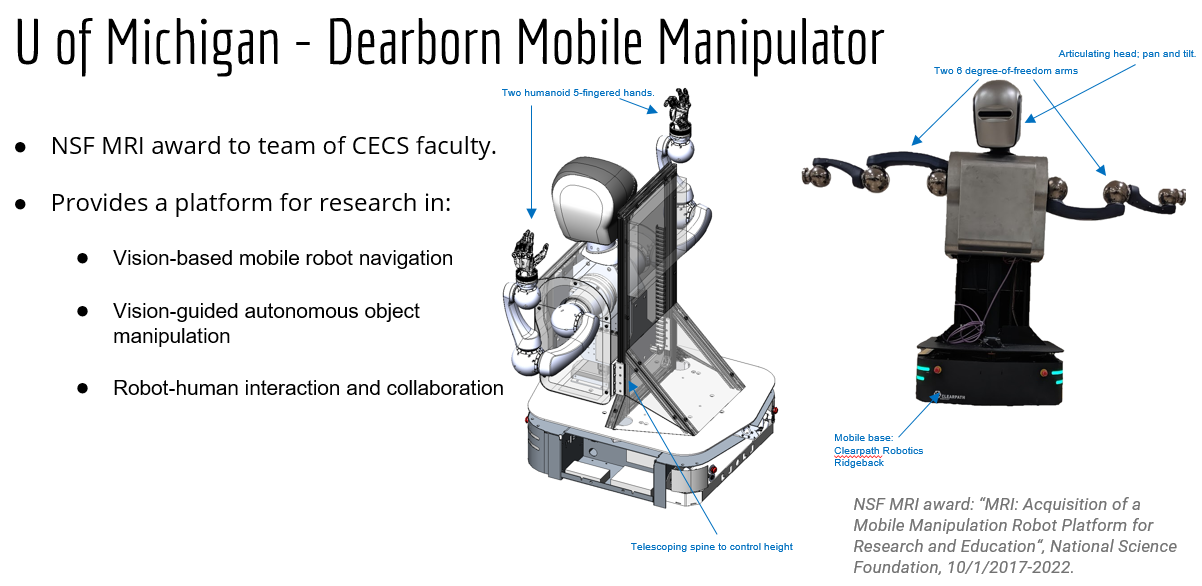
We are grateful for the support from the National Science Foundation to acquire this Humanoid Robot to support research and teaching at the University of Michigan – Dearborn. The proposal writing, design, and development involved numerous faculty colleagues and students at UM-Dearborn. We are also grateful for the excellent engineers and designers at Sundberg-Ferar who designed the torso and head and worked on general integration of the robot components.
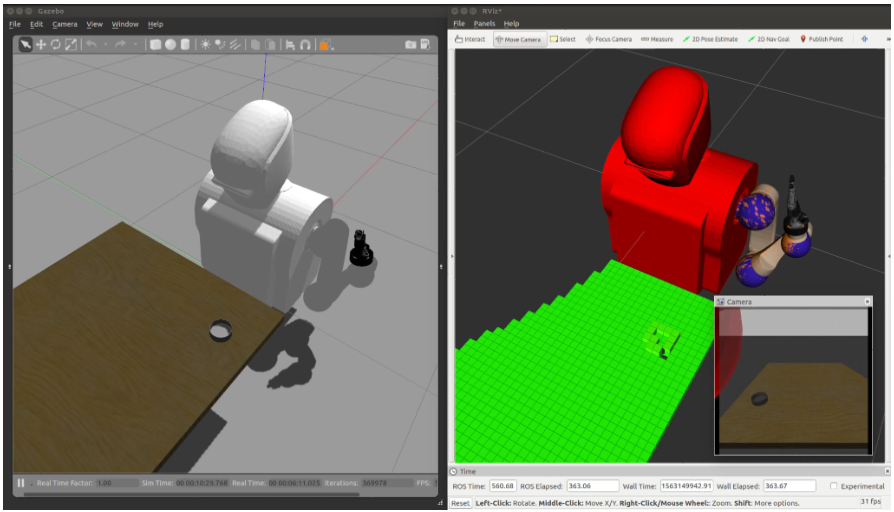
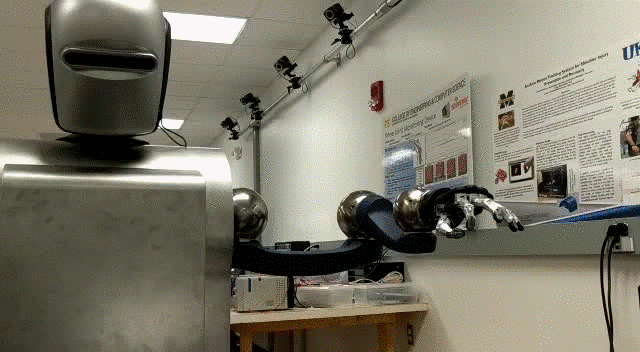
Over the summer, the robot was completed and we have started developing the software framework to support projects. We are using the Robot Operating System (ROS), and developing the software nodes to control the various components. Also, we are developing a simulation model of the robot to be able to try out algorithms in simulation before deploying them onto the actual (expensive) robot. Below are screenshots and a video of our early efforts developing a perception algorithm to detect objects on a work surface and the robot arm path planning to avoid collisions and move the hands to the object.
A quick note: the robot moves very slowly in the video for safety reasons.