ECE473 Embedded Systems Design for Winter 2015 has concluded recently. In the course, we work with ARM Cortex-M4F microcontrollers, mainly using the TI Tiva C Launchpad. The following are some of the final projects student teams have designed and implemented (in about 3.5 weeks).
RealTime Vehicle Data Display via Bluetooth Communication with OBD-II Port
Digital Laser Harp Musical Synthesizer and Remote DJ Sound Bar Controller
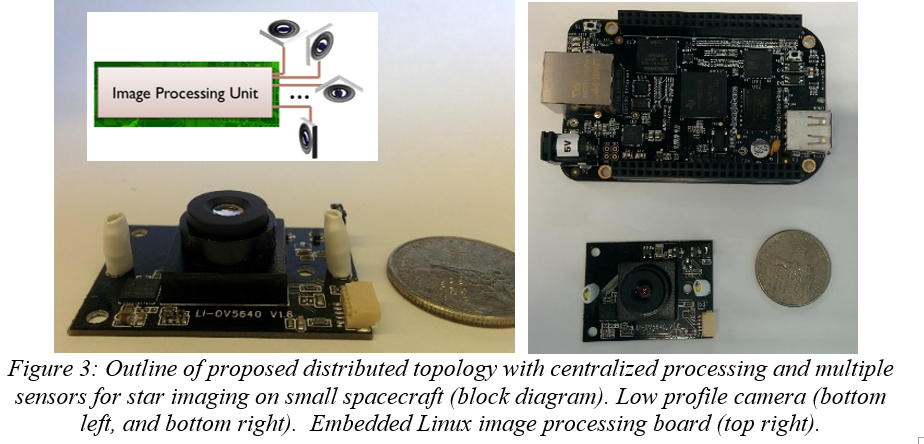
We have received an award from the NASA Michigan Space Grant Consortium to develop a star imaging approach for CubeSats using an array of miniature cameras.
Attitude determination for small spacecraft in the 1-5 kilogram range is one of the major technological challenges limiting their utility for a variety of missions. In prior work, we have developed a visual approach for attitude propagation. By tracking the motion of stars in a camera’s field of view, the rotation of the spacecraft can be found in three degrees of freedom. We refer to the approach as a stellar gyroscope. The proposed work builds on the prior success and findings to pursue a promising new topology. Essentially, we will miniaturize the sensor nodes and lenses to design a camera in the size range of modern smartphone cameras capable of star imaging while utilizing the stellar gyroscope algorithm’s noise tolerance in post-processing. This will allow small spacecraft to incorporate up to one camera on each side if needed, with one centralized image processing subsystem.
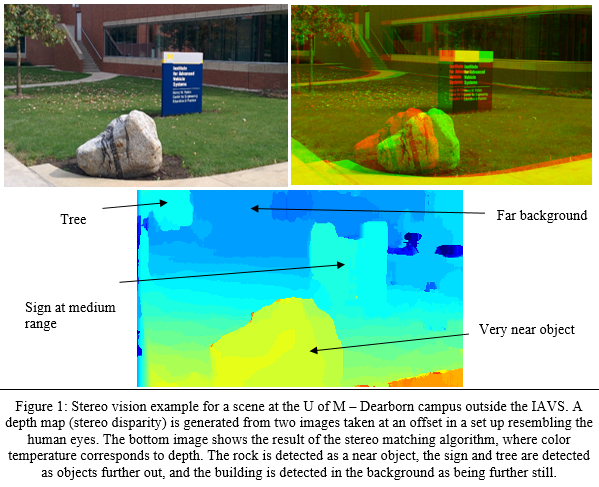
We have received a small award to pursue Stereo Vision on board small unmanned aircraft (aka drones, quad-copters, multi-copters). Obstacle sense and avoid (SAA) on board aerial vehicles is a key technology that needs to be addressed in order to meet the FAA safety requirements for future integration of drones into the civil airspace. Visual approaches, such as stereo vision, can play an important role in meeting these requirements.
We will be working with the 3D Robotics X8 copter and a set of embedded cameras. Students interested in being involved, please contact me.
ECE473 Embedded Systems Design for Fall 2014 has concluded recently. In the course, we work with ARM Cortex-M4F microcontrollers, mainly using the TI Tiva C Launchpad. The following are some of the final projects student teams have designed and implemented (in about 3 weeks).
Motorcycle Tilt Meter and Warning System
Entails interfacing a 3-axis accelerometer to measure tilt, a circular LED array, and designing a wheel RPM sensor to measure motorcycle velocity. Software and modeling challenges include identifying the safe tilt angle as a function of velocity.
Project by: Jason Learst and Alfred Kishek
2048 Game
Implementing the popular 2048 game on the embedded hardware. Entails interfacing a graphics LCD display, a matrix keypad, and developing the game engine.
Project by: Chuanzhi Yi and Hongsheng Wang
Location Reporting and Recording for High Altitude Balloons
Entails interfacing a GPS receiver, an SD Card, and a GSM modem. File System implementation is a major software component.
Project by: Gabriel Church, Nadeem Kizi, Felipe Marliere, Michael Azar
NASA has awarded payload flight opportunities for research and technology development onboard the International Space Station to academic institutions across the U.S. Among the selected projects is the launch and deployment of the KySat-2 secondary model from the ISS. The primary model KySat-2 was launched by NASA on November 19, 2013 out of Wallops Island, VA.
The research experiment includes several systems and experiments designed by Dr. Rawashdeh at the Space Systems Laboratory at the University of Kentucky. Specifically, a flight test of the Stellar Gyroscope concept, and analysis and of attitude dynamics using the SNAP simulation tool. The Rawashdeh group at UM-Dearborn will continue to support the mission, mainly in analyzing the experiment data. More on the KySat-2 Mission can be found here.
The primary mission is to test a new method of attitude determination for small spacecraft called the stellar gyroscope, which estimates attitude changes by analyzing the relative motion of stars between successive image frames, lowering the computational and power requirements necessary to propagate attitude changes. Launch from the ISS will allow characterization the stellar gyroscope hardware, verification of the sensitivity of the sensor for star imaging as well as the image processing required on-orbit. Additionally, ejection from the ISS altitude will allow analysis of the ejection dynamics of the spacecraft using the Smart Nanosatellite Attitude Propagator (SNAP) tool to characterize atmospheric drag for Low Earth Orbit (LEO) CubeSats.
This first post highlights some research projects that Dr. Rawashdeh worked on as a student at the University of Jordan and the University of Kentucky, prior to joining the faculty at the University of Michigan – Dearborn.
Visual Attitude Propagation for Small Satellites
This was my PhD research topic on inferring satellite attitude changes from apparent motion of stars in an imager’s view. I identified the need for such a sensor and have been developing the technology since 2011. I developed camera hardware and image processing algorithms to estimate relative attitude between star field images in 3 degrees of freedom. “Stellar Gyroscope” was a technology demonstration payload on the KySat-2 CubeSat.
SNAP is a simulation environment based on MATLAB and Simulink for small satellite attitude control system analysis and design. It is based on my master’s research, I maintain it and continue to develop it. As of January 2013, it has had over 250 downloads by universities, industry, and NASA centers, and received positive feedback. The SNAP page contains more information.
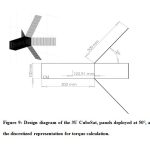
I have also developed aerodynamic torque models (not released with SNAP), that I used to develop CubeSat concepts that are aerodynamically stable in the rarefied atmosphere in low earth orbit. Aerodynamic torques combined with magnetic hysteresis damping can provide passive attitude stability, aligning the spacecraft with the velocity vector (like a badminton shuttlecock). My paper titled “Aerodynamic Stability for CubeSats at ISS Orbit” contains the latest results. It’s freely available from the Journal of Small Satellites.
KySat-2 (Launched November 2013)
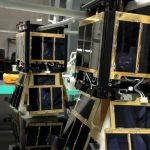
KySat-2 is the second generation CubeSat by the Kentucky Space Consortium. My PhD work on the stellar gyroscope was the main payload as a technology demonstration experiment. I was the science and payload lead, directing efforts on designing and integrating the camera and sensors on the system. I also advised on the satellite and mission design.
I have been involved in CubeSat EPS design activities at the SSL. With a graduate student colleague, we evaluated solar cell interface methods for CubeSats, including direct energy transfer and peak power tracking technologies. Independently, I have directed undergraduate and graduate student efforts to implement a complete CubeSat EPS with a distributed architecture utilizing point of load regulation, telemetry, and protection.
ISS CubeLab/Nanolab (2010 – 2013)
CubeLabs are miniature research modules on-board the International Space Station. The first two NanoRacks platforms (currently on the ISS) were developed by the Space Systems Laboratory. Most recently, we developed a CubeLab Bus, a generic platform to interface a science payload to the NanoRacks system.
The SPA architecture is a plug-and-play standard (similar to the automatic-discovery nature of USB devices on PCs) developed by the Airforce Research Lab for future rapid integration of satellites. At the SSL, adopted the SPA architecture for use on CubeLabs to support SPA devices on the ISS.
KySat-1 is Kentucky’s first satellite, a one-unit Orbital CubeSat. It was launched in March 2011 with the NASA Glory mission. The rocket failed to reach orbit due to a fairing separation failure. It was an ongoing project when I began graduate work at the University of Kentucky. I was involved in the integration, de-bugging, and testing efforts. I also designed the attitude stabilization system (drove development of SNAP, mentioned earlier).
ADAMASat and the Suborbital Experimental CubeSat Mission (SOCEM) (2009 – 2010)
SOCEM was a Sub-Orbital launch of a 2-Unit CubeSat on 27 March 2010, by NASA Wallops. ADAMASat is short for: Antenna Deployment and Mono-filament Actuator Satellite, it tested a deployment system used on KySat-1 in the space environment. I had an advisory role through the spacecraft and mission design phases, and the integration process. I lead the software development and testing efforts. Launch and satellite operation were a complete success.
High altitude balloon experiments were routinely launched by the Space Systems Laboratory during my Master’s and PhD work. I was team leader of Balloon-1 in June 2008, the helium balloon carried tracking hardware and a sensor suite to 98,000 ft. I lead hardware design and wrote flight software of the logging system. I supported several later launches in design reviews, payload development, and operations.
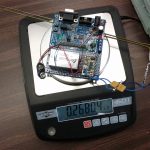
Experimenting with uBlox GPS unit
This board contains the logging circuit and the APRS position beacon (transmitting GPS coordinates).
Amateur Radio Simplex Repeater that provides communication during the balloon flight between chase teams.
Programmable Morse code UHF beacon
The process is nicely highlighted in this video of one of our high altitude balloon launches:
AviTrack: Migrating Bird Detection and Classification System (2005 – 2006)
AviTrack was an extra-curricular project during my undergraduate work, to compete at the 2006 IEEE Computer Society International Design Competition (CSIDC). It earned at Honorable Mention Award as a top ten team out of 133 entries, at the finals in Washington, DC. AviTrack is a Migrating Bird Detection and Classification System, in collaboration with the Royal Society for the Conservation of Nature, in Jordan.
Team leader of the University of Jordan’s team entry.
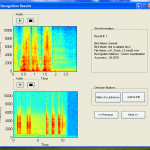
Developed a recognition algorithm for identification of bird species by their vocalizations, based on Cepstrum Coefficients and a Vector Quantization classifier.
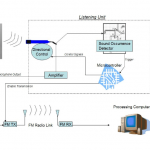
Designed and implemented microphone pointing embedded control system.
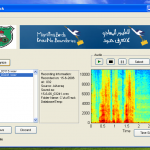
Main user interface window of AviTrack
Matching recorded bird song with database
Block Diagram of AviTrack hardware and electronics